 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenWebRL: Demystifying Online Multi-turn Reinforcement Learning for Visual Web Agents
Jun 01, 2026Building capable visual web agents requires long-horizon reasoning, precise grounding, and robust interaction with dynamic real-world websites. Despite rapid progress, the strongest systems remain largely proprietary, while open agents still depend heavily on supervised post-training over large collections of curated web trajectories. This dependence creates a major scalability bottleneck: high-quality demonstrations are expensive to collect, and static datasets offer limited coverage of the diverse, ever-changing open web. Although online RL has shown promise for text-based agents, its potential for training visual web agents directly on live websites remains largely underexplored. In this paper, we introduce OpenWebRL, an open framework for training visual web agents with online multi-turn RL on real websites. OpenWebRL covers the full training pipeline, including scalable live-browser infrastructure, supervised initialization, multimodal context management, trajectory-level success judging, and efficient multi-turn policy optimization. Using this framework, we train OpenWebRL-4B, which establishes a new open-source state of the art on challenging live-web benchmarks. With only 0.4K initialization trajectories and 2.2K open-ended RL training tasks, OpenWebRL-4B achieves 67.0% success on Online-Mind2Web and 64.0% on DeepShop, outperforming prior open agents of similar or larger scale and remaining competitive with proprietary systems including OpenAI CUA and Gemini CUA. Beyond strong benchmark performance, we systematically study the key design choices that make online RL effective for visual web agents, and analyze how RL improves agentic reasoning. Overall, our work offers a practical path toward building more capable, reproducible, and cost-efficient open web agents. We will release our training data, models, and code to support future research.
Latent Recurrent Transformer: Architecture Exploration, Training Strategies, and Scaling Behavior
May 26, 2026We study Latent Recurrent Transformer (LRT), a lightweight augmentation of autoregressive transformers that reuses a high-level source-layer hidden state from the previous token as recurrent memory for the next token. Because this source state is already computed during ordinary decoding, LRT adds a cross-layer recurrent latent pathway across positions without inserting pause tokens or extra depth loops, and the standard attention mechanism and KV-cache interface are preserved. To pretrain this recurrence at scale without sequentially unrolling the transformer, we introduce interleaved parallel training: a single full-sequence initialization forward pass builds a shared buffer; then disjoint position subsets are refined in parallel and written back, so that all tokens receive recurrent-memory-aware supervision at roughly 2 times baseline compute. Across nanochat style backbones and a wide range of tokens-per-parameter budgets, LRT improves both language-modeling loss and in-context learning under matched effective compute while adding as little as 0.3% parameters.
Orchard: An Open-Source Agentic Modeling Framework
May 14, 2026Agentic modeling aims to transform LLMs into autonomous agents capable of solving complex tasks through planning, reasoning, tool use, and multi-turn interaction with environments. Despite major investment, open research remains constrained by infrastructure and training gaps. Many high-performing systems rely on proprietary codebases, models, or services, while most open-source frameworks focus on orchestration and evaluation rather than scalable agent training. We present Orchard, an open-source framework for scalable agentic modeling. At its core is Orchard Env, a lightweight environment service providing reusable primitives for sandbox lifecycle management across task domains, agent harnesses, and pipeline stages. On top of Orchard Env, we build three agentic modeling recipes. Orchard-SWE targets coding agents. We distill 107K trajectories from MiniMax-M2.5 and Qwen3.5-397B, introduce credit-assignment SFT to learn from productive segments of unresolved trajectories, and apply Balanced Adaptive Rollout for RL. Starting from Qwen3-30B-A3B-Thinking, Orchard-SWE achieves 64.3% on SWE-bench Verified after SFT and 67.5% after SFT+RL, setting a new state of the art among open-source models of comparable size. Orchard-GUI trains a 4B vision-language computer-use agent using only 0.4K distilled trajectories and 2.2K open-ended tasks. It achieves 74.1%, 67.0%, and 64.0% success rates on WebVoyager, Online-Mind2Web, and DeepShop, respectively, making it the strongest open-source model while remaining competitive with proprietary systems. Orchard-Claw targets personal assistant agents. Trained with only 0.2K synthetic tasks, it achieves 59.6% pass@3 on Claw-Eval and 73.9% when paired with a stronger ZeroClaw harness. Collectively, these results show that a lightweight, open, harness-agnostic environment layer enables reusable agentic data, training recipes, and evaluations across domains.
WebXSkill: Skill Learning for Autonomous Web Agents
Apr 14, 2026Autonomous web agents powered by large language models (LLMs) have shown promise in completing complex browser tasks, yet they still struggle with long-horizon workflows. A key bottleneck is the grounding gap in existing skill formulations: textual workflow skills provide natural language guidance but cannot be directly executed, while code-based skills are executable but opaque to the agent, offering no step-level understanding for error recovery or adaptation. We introduce WebXSkill, a framework that bridges this gap with executable skills, each pairing a parameterized action program with step-level natural language guidance, enabling both direct execution and agent-driven adaptation. WebXSkill operates in three stages: skill extraction mines reusable action subsequences from readily available synthetic agent trajectories and abstracts them into parameterized skills, skill organization indexes skills into a URL-based graph for context-aware retrieval, and skill deployment exposes two complementary modes, grounded mode for fully automated multi-step execution and guided mode where skills serve as step-by-step instructions that the agent follows with its native planning. On WebArena and WebVoyager, WebXSkill improves task success rate by up to 9.8 and 12.9 points over the baseline, respectively, demonstrating the effectiveness of executable skills for web agents. The code is publicly available at https://github.com/aiming-lab/WebXSkill.
The Tool Illusion: Rethinking Tool Use in Web Agents
Apr 03, 2026As web agents rapidly evolve, an increasing body of work has moved beyond conventional atomic browser interactions and explored tool use as a higher-level action paradigm. Although prior studies have shown the promise of tools, their conclusions are often drawn from limited experimental scales and sometimes non-comparable settings. As a result, several fundamental questions remain unclear: i) whether tools provide consistent gains for web agents, ii) what practical design principles characterize effective tools, and iii) what side effects tool use may introduce. To establish a stronger empirical foundation for future research, we revisit tool use in web agents through an extensive and carefully controlled study across diverse tool sources, backbone models, tool-use frameworks, and evaluation benchmarks. Our findings both revise some prior conclusions and complement others with broader evidence. We hope this study provides a more reliable empirical basis and inspires future research on tool-use web agents.
Reinforcement World Model Learning for LLM-based Agents
Feb 05, 2026Large language models (LLMs) have achieved strong performance in language-centric tasks. However, in agentic settings, LLMs often struggle to anticipate action consequences and adapt to environment dynamics, highlighting the need for world-modeling capabilities in LLM-based agents. We propose Reinforcement World Model Learning (RWML), a self-supervised method that learns action-conditioned world models for LLM-based agents on textual states using sim-to-real gap rewards. Our method aligns simulated next states produced by the model with realized next states observed from the environment, encouraging consistency between internal world simulations and actual environment dynamics in a pre-trained embedding space. Unlike next-state token prediction, which prioritizes token-level fidelity (i.e., reproducing exact wording) over semantic equivalence and can lead to model collapse, our method provides a more robust training signal and is empirically less susceptible to reward hacking than LLM-as-a-judge. We evaluate our method on ALFWorld and $τ^2$ Bench and observe significant gains over the base model, despite being entirely self-supervised. When combined with task-success rewards, our method outperforms direct task-success reward RL by 6.9 and 5.7 points on ALFWorld and $τ^2$ Bench respectively, while matching the performance of expert-data training.
Adapting Web Agents with Synthetic Supervision
Nov 08, 2025Web agents struggle to adapt to new websites due to the scarcity of environment specific tasks and demonstrations. Recent works have explored synthetic data generation to address this challenge, however, they suffer from data quality issues where synthesized tasks contain hallucinations that cannot be executed, and collected trajectories are noisy with redundant or misaligned actions. In this paper, we propose SynthAgent, a fully synthetic supervision framework that aims at improving synthetic data quality via dual refinement of both tasks and trajectories. Our approach begins by synthesizing diverse tasks through categorized exploration of web elements, ensuring efficient coverage of the target environment. During trajectory collection, we refine tasks when conflicts with actual observations are detected, mitigating hallucinations while maintaining task consistency. After collection, we conduct trajectory refinement with a global context to mitigate potential noise or misalignments. Finally, we fine-tune open-source web agents on the refined synthetic data to adapt them to the target environment. Experimental results demonstrate that SynthAgent outperforms existing synthetic data methods, validating the importance of high-quality synthetic supervision. The code will be publicly available at https://github.com/aiming-lab/SynthAgent.
Dyna-Mind: Learning to Simulate from Experience for Better AI Agents
Oct 10, 2025



Reasoning models have recently shown remarkable progress in domains such as math and coding. However, their expert-level abilities in math and coding contrast sharply with their performance in long-horizon, interactive tasks such as web navigation and computer/phone-use. Inspired by literature on human cognition, we argue that current AI agents need ''vicarious trial and error'' - the capacity to mentally simulate alternative futures before acting - in order to enhance their understanding and performance in complex interactive environments. We introduce Dyna-Mind, a two-stage training framework that explicitly teaches (V)LM agents to integrate such simulation into their reasoning. In stage 1, we introduce Reasoning with Simulations (ReSim), which trains the agent to generate structured reasoning traces from expanded search trees built from real experience gathered through environment interactions. ReSim thus grounds the agent's reasoning in faithful world dynamics and equips it with the ability to anticipate future states in its reasoning. In stage 2, we propose Dyna-GRPO, an online reinforcement learning method to further strengthen the agent's simulation and decision-making ability by using both outcome rewards and intermediate states as feedback from real rollouts. Experiments on two synthetic benchmarks (Sokoban and ALFWorld) and one realistic benchmark (AndroidWorld) demonstrate that (1) ReSim effectively infuses simulation ability into AI agents, and (2) Dyna-GRPO leverages outcome and interaction-level signals to learn better policies for long-horizon, planning-intensive tasks. Together, these results highlight the central role of simulation in enabling AI agents to reason, plan, and act more effectively in the ever more challenging environments.
Decoder-Hybrid-Decoder Architecture for Efficient Reasoning with Long Generation
Jul 09, 2025



Recent advances in language modeling have demonstrated the effectiveness of State Space Models (SSMs) for efficient sequence modeling. While hybrid architectures such as Samba and the decoder-decoder architecture, YOCO, have shown promising performance gains over Transformers, prior works have not investigated the efficiency potential of representation sharing between SSM layers. In this paper, we introduce the Gated Memory Unit (GMU), a simple yet effective mechanism for efficient memory sharing across layers. We apply it to create SambaY, a decoder-hybrid-decoder architecture that incorporates GMUs in the cross-decoder to share memory readout states from a Samba-based self-decoder. SambaY significantly enhances decoding efficiency, preserves linear pre-filling time complexity, and boosts long-context performance, all while eliminating the need for explicit positional encoding. Through extensive scaling experiments, we demonstrate that our model exhibits a significantly lower irreducible loss compared to a strong YOCO baseline, indicating superior performance scalability under large-scale compute regimes. Our largest model enhanced with Differential Attention, Phi4-mini-Flash-Reasoning, achieves significantly better performance than Phi4-mini-Reasoning on reasoning tasks such as Math500, AIME24/25, and GPQA Diamond without any reinforcement learning, while delivering up to 10x higher decoding throughput on 2K-length prompts with 32K generation length under the vLLM inference framework. We release our training codebase on open-source data at https://github.com/microsoft/ArchScale.
Phi-4-Mini-Reasoning: Exploring the Limits of Small Reasoning Language Models in Math
Apr 30, 2025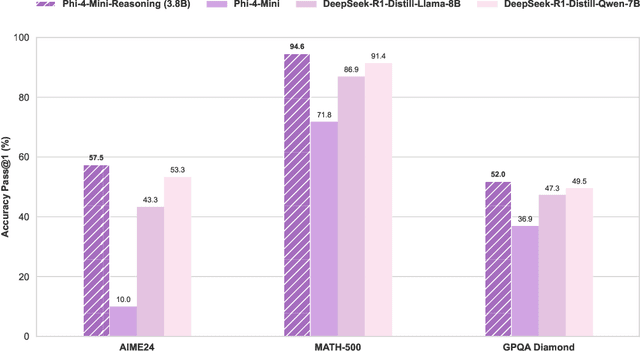
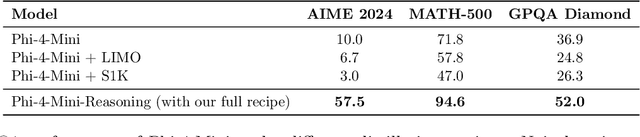
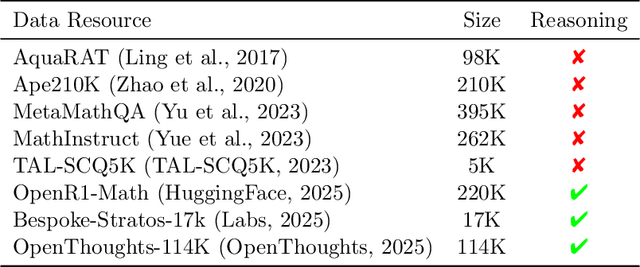
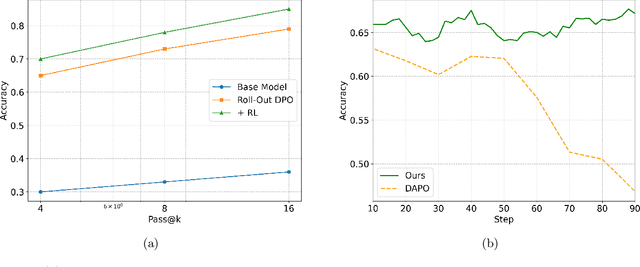
Chain-of-Thought (CoT) significantly enhances formal reasoning capabilities in Large Language Models (LLMs) by training them to explicitly generate intermediate reasoning steps. While LLMs readily benefit from such techniques, improving reasoning in Small Language Models (SLMs) remains challenging due to their limited model capacity. Recent work by Deepseek-R1 demonstrates that distillation from LLM-generated synthetic data can substantially improve the reasoning ability of SLM. However, the detailed modeling recipe is not disclosed. In this work, we present a systematic training recipe for SLMs that consists of four steps: (1) large-scale mid-training on diverse distilled long-CoT data, (2) supervised fine-tuning on high-quality long-CoT data, (3) Rollout DPO leveraging a carefully curated preference dataset, and (4) Reinforcement Learning (RL) with Verifiable Reward. We apply our method on Phi-4-Mini, a compact 3.8B-parameter model. The resulting Phi-4-Mini-Reasoning model exceeds, on math reasoning tasks, much larger reasoning models, e.g., outperforming DeepSeek-R1-Distill-Qwen-7B by 3.2 points and DeepSeek-R1-Distill-Llama-8B by 7.7 points on Math-500. Our results validate that a carefully designed training recipe, with large-scale high-quality CoT data, is effective to unlock strong reasoning capabilities even in resource-constrained small models.